
Dự án này mô tả cách động cơ DC có thể được di chuyển theo hướng thuận hoặc ngược bằng cách sử dụng điều khiển từ xa của TV hoặc DVD.Mục tiêu là xây dựng một trình điều khiển động cơ hai chiều đơn giản sử dụng chuỗi xung hồng ngoại (IR) 38kHz được điều chế cho mục đích mà không cần sử dụng bất kỳ bộ vi điều khiển hoặc lập trình nào.
Nguyên mẫu của tác giả được hiển thị trong Hình 1.

Mạch và làm việc
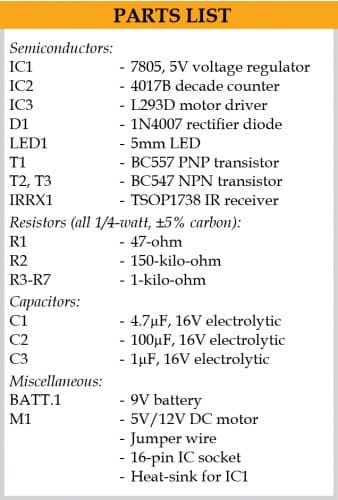
Sơ đồ mạch của dự án được hiển thị trong Hình 2. Nó được xây dựng xung quanh mô-đun thu IR TSOP1738 (IRRX1), bộ đếm thập kỷ 4017B (IC2), trình điều khiển động cơ L293D (IC3), bóng bán dẫn PNP BC557 (T1), hai bóng bán dẫn NPN BC547 ( T2 và T3), nguồn điện điều chỉnh 5V (IC1) và pin 9V.
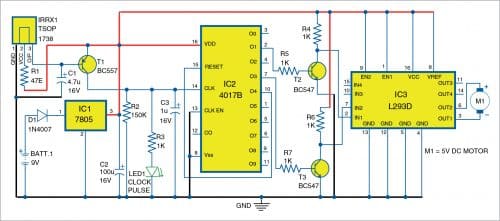
Pin 9V được nối qua diode D1 tới bộ ổn áp 7805 để tạo ra điện áp DC 5V cần thiết cho dự án.Tụ điện C2 (100µF, 16V) được sử dụng để loại bỏ gợn sóng.
Trong điều kiện bình thường, chân đầu ra 3 của mô-đun IR RX1 ở mức logic cao, có nghĩa là bóng bán dẫn T1 kết nối với nó bị ngắt và do đó cực thu của nó ở mức logic thấp.Bộ thu của T1 điều khiển xung đồng hồ của bộ đếm thập kỷ IC2.
Khi hướng điều khiển từ xa về phía mô-đun IR và nhấn bất kỳ phím nào, mô-đun sẽ nhận được xung IR 38kHz từ điều khiển từ xa.Các xung này được đảo ngược tại bộ thu của T1 và được đưa đến chân đầu vào đồng hồ 14 của bộ đếm thập kỷ IC2.
Các xung IR đến tăng bộ đếm thập kỷ ở cùng tốc độ (38kHz) nhưng do có bộ lọc RC (R2=150k và C3=1µF) ở chân đầu vào đồng hồ 14 của IC2, chuỗi xung xuất hiện dưới dạng một xung tại quầy.Do đó, khi nhấn từng phím, bộ đếm chỉ tăng lên một lần đếm duy nhất.
Khi nhả phím điều khiển từ xa, tụ điện C3 phóng điện qua điện trở R2 và dòng đồng hồ trở về 0.Vì vậy, mỗi khi người dùng nhấn và nhả một phím trên điều khiển từ xa, bộ đếm sẽ nhận được một xung ở đầu vào đồng hồ và đèn LED1 sẽ phát sáng để xác nhận rằng xung đã được nhận.
Trong quá trình hoạt động có thể có năm khả năng:
Trường hợp 1
Khi nhấn phím điều khiển từ xa, xung đầu tiên xuất hiện và đầu ra O0 của bộ đếm thập kỷ (IC2) tăng cao trong khi các chân O1 đến O9 ở mức thấp, có nghĩa là các bóng bán dẫn T2 và T3 ở trạng thái ngắt.Bộ thu của cả hai bóng bán dẫn được kéo lên trạng thái cao bằng điện trở 1 kilo-ohm (R4 và R6), do đó cả hai đầu vào IN1 và IN2 của trình điều khiển động cơ L293D (IC3) đều trở nên cao.Ở giai đoạn này, động cơ ở trạng thái tắt.
Trường hợp 2
Khi một phím được nhấn lại, xung thứ hai đến dòng CLK sẽ tăng bộ đếm lên một.Tức là khi xung thứ hai đến, đầu ra O1 của IC2 lên cao, trong khi các đầu ra còn lại ở mức thấp.Vì vậy, bóng bán dẫn T2 dẫn điện và T3 bị cắt.Điều đó có nghĩa là điện áp tại bộ thu của T2 xuống thấp (IN1 của IC3) và điện áp tại bộ thu của T3 trở nên cao (IN2 của IC3) và đầu vào IN1 và IN2 của IC3 điều khiển động cơ lần lượt trở thành 0 và 1.Ở trạng thái này, động cơ quay theo chiều thuận.
Trường hợp 3
Khi một phím được nhấn một lần nữa, xung thứ ba đến dòng CLK sẽ tăng bộ đếm lên một lần nữa.Vì vậy lượng O2 của IC2 tăng cao.Vì không có gì được kết nối với chân O2 và các chân đầu ra O1 và O3 ở mức thấp, nên cả hai bóng bán dẫn T2 và T3 đều chuyển sang trạng thái cắt.
Các cực Collector của cả hai bóng bán dẫn được kéo lên trạng thái cao bởi các điện trở 1 kilo-ohm R4 và R6, có nghĩa là các cực đầu vào IN1 và IN2 của IC3 trở nên cao.Ở giai đoạn này, động cơ lại ở trạng thái tắt.
Trường hợp 4
Khi một phím được nhấn một lần nữa, xung thứ tư đến dòng CLK sẽ tăng bộ đếm lên một lần lần thứ tư.Bây giờ đầu ra O3 của IC2 lên cao, trong khi các đầu ra còn lại ở mức thấp, do đó bóng bán dẫn T3 dẫn điện.Điều đó có nghĩa là điện áp tại cực thu của T2 trở nên cao (IN1 của IC3) và điện áp tại cực thu của T3 trở nên thấp (IN2 của IC3).Vì vậy, đầu vào IN1 và IN2 của IC3 lần lượt ở mức 1 và 0.Ở trạng thái này, động cơ quay theo hướng ngược lại.
Trường hợp 5
Khi một phím được nhấn lần thứ năm, xung thứ năm đến dòng CLK sẽ tăng bộ đếm lên một lần nữa.Do O4 (chân 10 của IC2) được nối dây tới Chân đầu vào Reset 15 của IC2, nên việc nhấn lần thứ năm sẽ đưa IC bộ đếm thập kỷ trở lại trạng thái bật nguồn khi đặt lại với O0 ở mức cao.
Do đó, mạch hoạt động như một bộ điều khiển động cơ hai chiều được điều khiển bằng điều khiển từ xa hồng ngoại.
Xây dựng và thử nghiệm
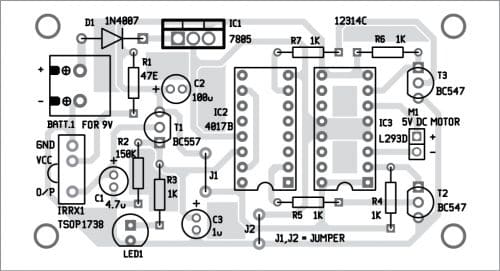
Mạch có thể được lắp ráp trên Veroboard hoặc PCB có bố cục kích thước thực tế được hiển thị trong Hình 3. Cách bố trí các thành phần cho PCB được hiển thị trong Hình 4.
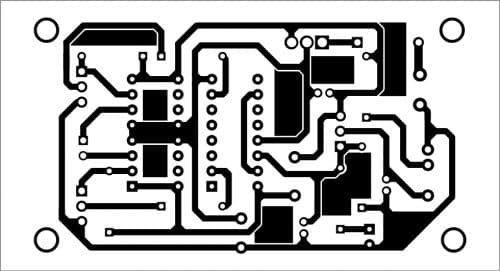
Tải xuống bản PDF bố cục PCB và Thành phần:bấm vào đây
Sau khi lắp ráp mạch, nối pin 9V qua BATT.1.Tham khảo Bảng chân trị (Bảng 1) để vận hành và làm theo các bước được mô tả trong Trường hợp 1 đến Trường hợp 5 ở trên.
Được chỉnh sửa bởi Lisa
Thời gian đăng: 29-09-2021